こだわりアカデミー
人間型ロボットを研究することで 人間を解明することができるんです。
二足歩行ロボットはこうして誕生した
早稲田大学理工学部教授
高西 淳夫 氏
たかにし あつお

1956年、福岡県生れ。80年、早稲田大学理工学部機械工学科卒業。85年、同大学大学院理工学研究科修士課程を修了し、同大学理工学部助手に。専任講師、助教授を経て、97年より現職。工学博士。共著に『マイロボット 読売科学選書〈35〉』(90年、読売新聞社)、『人間型ロボットのはなし』(99年、日刊工業新聞社)他。
2002年2月号掲載
ロボット先進国ニッポン!
──先生は、日本のヒューマノイド(人間型)ロボット研究の第一人者でいらっしゃいます。
「ロボットと聞いて、どんなものを思い浮かべるか?」と周りの人に聞いてみると、AIBOや二足歩行ロボットと答えた人が多かったのですが、中には産業用ロボットという人もいました。最近はダンスが踊れるロボットなども登場したそうですが、そもそもロボットとはどのようなものをいうのですか?
高西 確かに、一口にロボットといってもさまざまな種類があるのですが、産業用ロボットに関していえば、日本ではJIS、アメリカだとRIA(ロボット工業会)などの規格があります。簡単にいうと、物を操作、移動する機械装置で、しかもプログラムを変えることでその動作が変るもののことです。ただ、そうすると自動機械はすべてロボットということになるので、専門家の多くは、「形は問わないが、自分で動きを決め、周囲の環境に適応できる知的な機械がロボットである」としています。まだ、はっきりとした定義を持つまでに達していないのが現状です。
──なるほど。ところで、日本のロボット開発技術は世界と比較してもかなり進んでいると聞いていますが、本当ですか?
高西 ええ。1999年の産業用ロボットの稼働台数を見ても、アメリカが9万台であるのに対して、日本は42万台です。これだけでも、日本がロボットの先進国として、世界のトップを走っているとお分りいただけるのではないでしょうか。画像処理能力や手の動きなど、ある分野で優れた研究者というのは世界中にいますが、総合力では日本はトップクラスです。

──うれしい話ですね。でも、どうして日本がこれだけのロボット先進国になったのですか?
高西 ロボットに対する認識の違いが、一番の要因といえます。
──とおっしゃいますと?
高西 欧米では、ロボットはあくまでも人間のために働く機械、いわゆるサーバント(召使い)的なものなのです。日本では、たとえ自動的に動く機械であっても、親しみを持って人間のような名前を付けたりしています。工場などでよく見られる光景ですが、欧米ではそのような行為は考えられないことなんです。特に、人間型ロボットに対しては抵抗が強く、神以外の者がヒトを創造することは、神を冒涜していると考える人もいます。海外のメディアからインタビューを受けると、必ず「日本は人間型ロボットや生物型ロボットをつくって平気なのか」とか、「もう1000年もすれば、人類がロボットに支配されているのではないか」という質問をされます。ロボットに対する敵意や恐怖感があるようです。
──まさに宗教や文化の違いですね。日本では『鉄腕アトム』などの影響もあってか、・心優しく、力強い正義の味方・というイメージが強いですよね。
では、欧米では人間型ロボットの研究は、それほど進んでいないのですか?
高西 以前に比べると、多少は受け入れられ易くなり、研究も本格的になってきているといえます。ただ、一口に「欧米」といっても、国によってロボット観はさまざまで、例えばイタリアはローマ・カソリックの国だけあって、抵抗が非常に強い。イギリスは比較的受け入れられ易い感じがしますね。アメリカは多民族国家なので受け取り方は人それぞれですが、私の知合いで人間型ロボットを研究している大学教授は、年に数通、カルト宗教から脅迫状が届くといっていました。
──それは怖い! 日本では考えられないことですね。でも、それだけ日本はロボットを受け入れ易い文化、研究し易い土壌を持っているということですね。
高西 そうなんです。この環境こそ、日本がロボット開発において他国の上を行く格好の条件なんです。経済や法律など、いろいろな面で欧米を追い掛けてきた日本ですが、ロボットではそれを覆すことができるのではないかと思います。
──それは大いに期待しております(笑)。
義手から始まったロボット研究
──先生は、いつ頃からロボットの研究をされているのですか?
高西 実は、最初はロボットではなく、義手の研究をしていたんです。私の恩師は、日本で初めてロボット研究を始められた加藤一郎先生なのですが、加藤先生が研究をスタートされた60年代当時は、「ロボット」という言葉はまだ漫画やSF小説の中の言葉で、研究者がそのような言葉を使ってどうするんだ、という時代だったんです。ロボットという言葉が認められるようになったのは、70年代になって産業用ロボットが登場してからで、ようやくその頃から堂々とロボットの研究ができるようになったんです。
──では、日本で二足歩行の人間型ロボットが最初に誕生したのは、いつ頃なんですか?
高西 73年です。加藤先生を中心とした共同研究グループが、二足歩行の他に簡単な会話機能や視覚システムを備えた世界初の本格的人間型知能ロボット「WABOT-1(ワボット・ワン)」の開発に成功しました。実は、この頃は専門家ですら「鉄でできた機械で二足歩行は不可能だ」といっていた時代でしたから、これは非常に大きなチャレンジだったんです。
その研究グループが発展したのが、現在の「早稲田大学ヒューマノイド研究所」で、生物学や心理学、医学の研究者を交えた学科横断プロジェクトとして、人間型ロボットの研究をしています。
──二足歩行が難しいというのは、素人考えでも分る気がします。二本足の人形を立たせるだけでも重心のバランスをとるのが難しいのに、歩かせたり、ターンさせたりとなると相当難しいのでしょうね。
 |
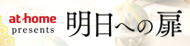
| 二足歩行ロボット『WABIAN-RIV』(2001年)。身長189センチメートル、体重131.4キログラム。人間の身振りや手振り、音声による指示に応じて、歩く向きやテンポ、歩幅などを変更する。喜び、悲しみ、怒りの3つの感情を表現しながらの歩行ができる(写真提供:早稲田大学高西敦夫研究室) |
高西 ええ。「歩行」という動きを、単に重心の移動と考えるのではなく、着眼点を変えないとスムーズな二足歩行の原理は見えてきません。
──それがZMPというものですね?
高西 そうです。ZMP(ゼロ・モーメント・ポイント)という、すべての力がつり合うポイントに着目したんです。ZMPは、片脚で立っている「単脚支持期」には支持脚の足裏に、支える脚を切り換える「立脚切換期」には、両足裏で形成される領域(支持多角形)の範囲内にあります。ここを制御することで、人間のようにスタスタと自然に動けるようになりました。
──足の裏にポイントがあったとは、思いもしませんでした。
高西 歩いている時、どうやって歩いているのか意識している人はいませんからね。そういった無意識の動作を解明し、数値化するというのは非常に大変なことです。
でも、こうして人間型ロボットを研究することで、ロボット工学の視点から人間を解明することもできるわけです。人間と同じように動かすことができるということは、人間の行動や運動機能を数値的、客観的に表現できるわけですから。これは、病気の治療やリハビリを行なう際にも、非常に有効だと思います。
ロボットと生活する日はもう目前?!
──それにしても、これだけロボット開発の技術が発達しているとなると、私達がロボットと共に生活する日もそう遠くない気がしますね。
高西 家庭や社会の中で、ロボットが活躍する場所は間違いなく増えていくでしょう。しかも、人間が生活する環境の中で、ロボットが動き回るには人間型ロボットが向いていることも確かです。
──先生はロボット技術を応用して、他にどのようなご研究を?
高西 ラット型ロボットを使って、ラットがロボットとどのようなコミュニケーションをとるのか、研究しています。これには動物心理学の先生達も驚いています。「まさかロボットを使って、動物心理学を学ぶとは思いもしなかった」と(笑)。
 |
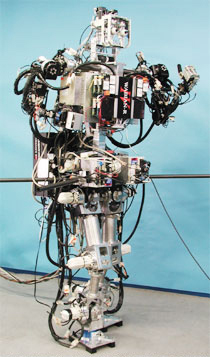
| 情動表出ロボット『WE-3RV』。触覚・視覚・嗅覚センサーなどからの外部環境情報によって、顔色や眉・唇・瞼を変化させ、「喜び」「怒り」「驚き」などの感情を表現する |
他にも、人間型フルート演奏ロボットや、表情や顔色を変えて感情を表現するロボット、感情を動きで表現しながら二足歩行をするロボットなどを開発して、ロボットと人との自然なコミュニケーションをめざしています。
顎関節症の患者さんを治療するための、咀嚼ロボットなども開発しましたし、工学だけでなく社会学や医学、心理学などさまざまな分野からロボットを研究しています。
──続々と、いろいろなロボットが開発されているんですね。
では、鉄腕アトムとまではいかなくても、人間型介護ロボットや家事ロボットも、間もなく誕生しそうですか?
高西 残念ながら、それは随分先の事になりそうです。ロボットはプログラムされている事以外はできないので、人間のように、患者さんの容態の変化に臨機応変に対応することができません。そこまで到達するには、まだまだ解明しなければいけないことがたくさんあります。人間型ロボットを研究すればするほど、いかに人間が優れているのかということが分ります。
──いろいろな研究テーマが出てきて大変でしょうけど、その分楽しそうですね。
高西 そうですね。それに、とてもやりがいのある研究です。ロボット開発も含めて、工学は人間にとって役に立つものをつくるという目的を持っています。ただ単にモノをつくるというのではなく、人間の幸せのために工学という立場からお役に立てるように、今後もロボット研究を続けていこうと思います。
──どんなロボットが登場するのか、想像するだけでもワクワクしてきます。人間とロボットが良い関係で生活できる日が訪れることを、楽しみにしています。
本日はありがとうございました。
 |
| 『人間型ロボットのはなし』(日刊工業新聞社) |
 サイト内検索
サイト内検索

Copyright(C) At Home Co., Ltd.